Glide
As autonomous vehicles (AVs) become more prevalent, ensuring passenger trust and comfort is essential. Glide addresses this by allowing passengers to intuitively adjust driving parameters—distance, acceleration, and speed—via a tactile physical interface. Haptic feedback enables unobtrusive communication of preferences, while a central graphical interface provides real-time visual feedback. This combination enhances control and transparency, improving the overall AV experience.
Project Type : Individual Project – FMP
Contribution: As this was an Individual Project I worked on every part of this project. The project was done for Mercedes-Benz Design in Sindelfingen.
Date: Sep/2024 – Jan/2025

Control Mode Design
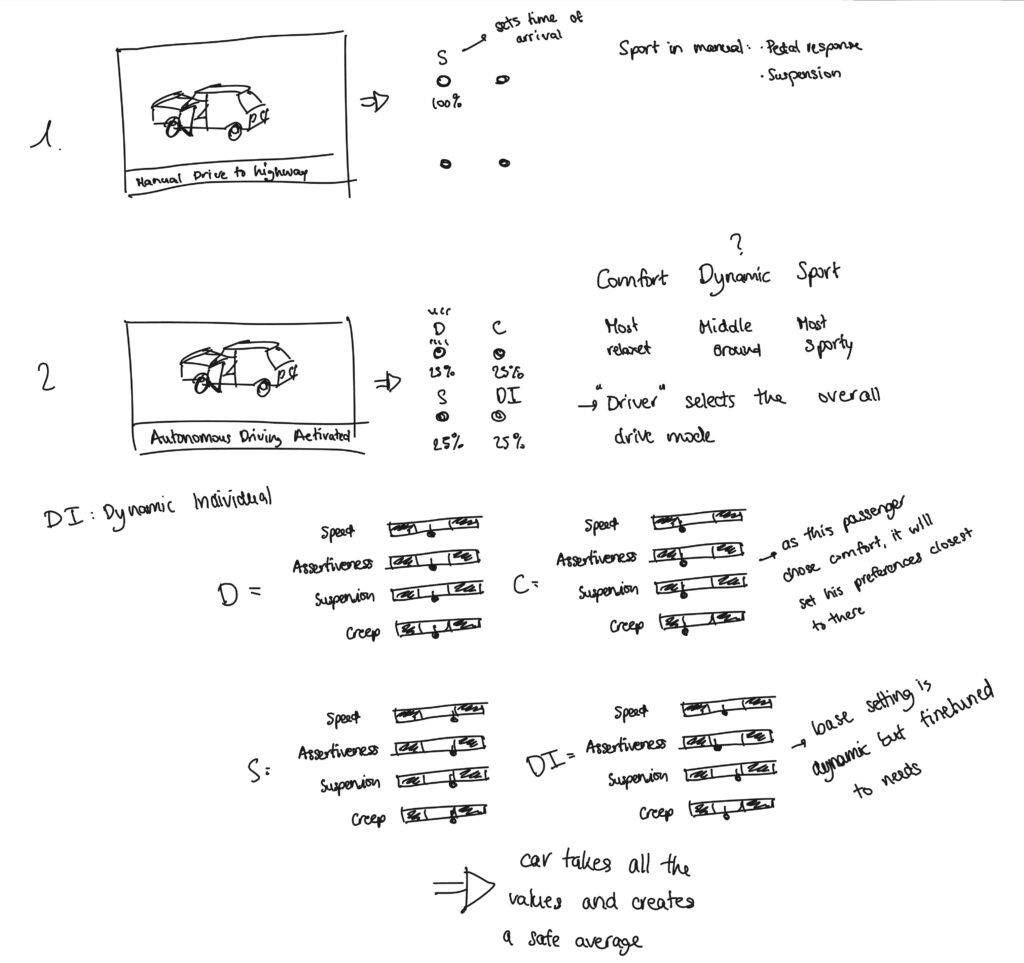
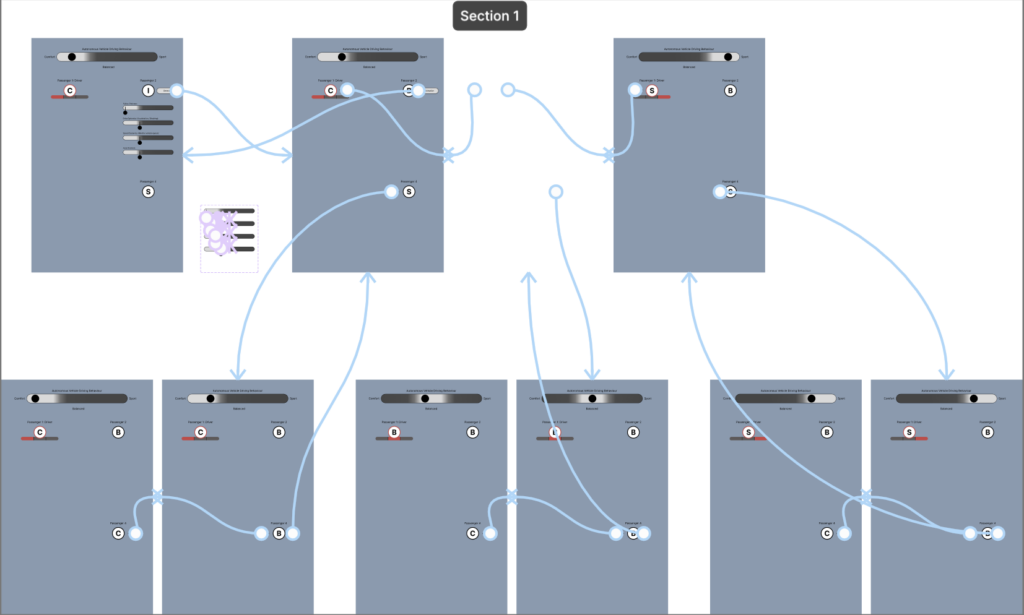
After conducting literature research, co-creation sessions with experts in Automotive UX Design were conducted to create a new control distribution method for AVs.Following a brainstorming, and an exploration into using emotions as a control divider, a concept was developed which was first exploratively evaluated with an Automotive Designer and afterwards worked out further through an interactive Figma interface.
The new control division is as follows: The driver retains more control over the driving style, yet the passengers are given some control to fine tune it.The interactive interface was then evaluated with Designers and potential users.
Handle Design
The next step was the development of the tangible interface. This resulted in the simultaneous design of the Handle, Graphic UI and Technical Prototype. The handle design changed repeatedly and was adapted to insights from the parallel development of the other two parts.

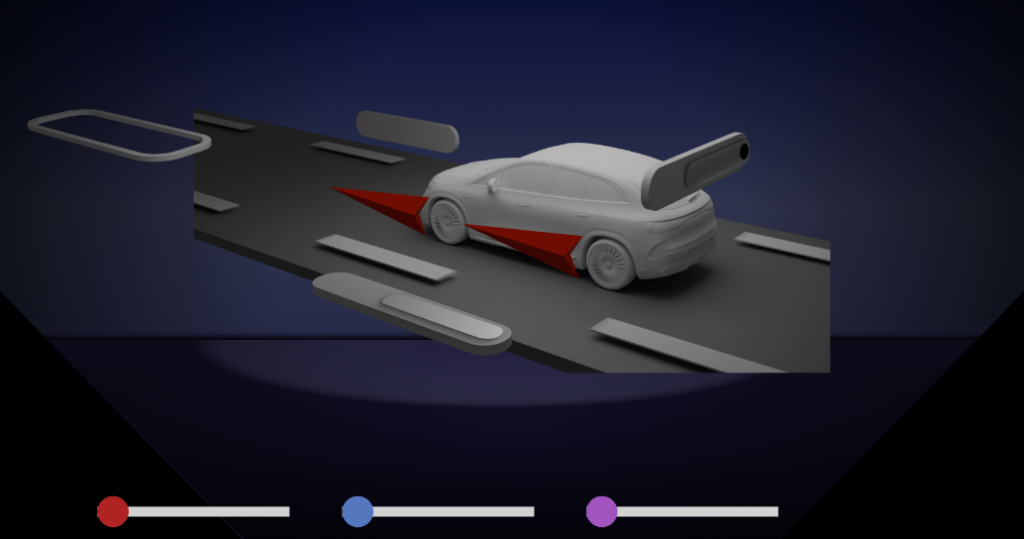


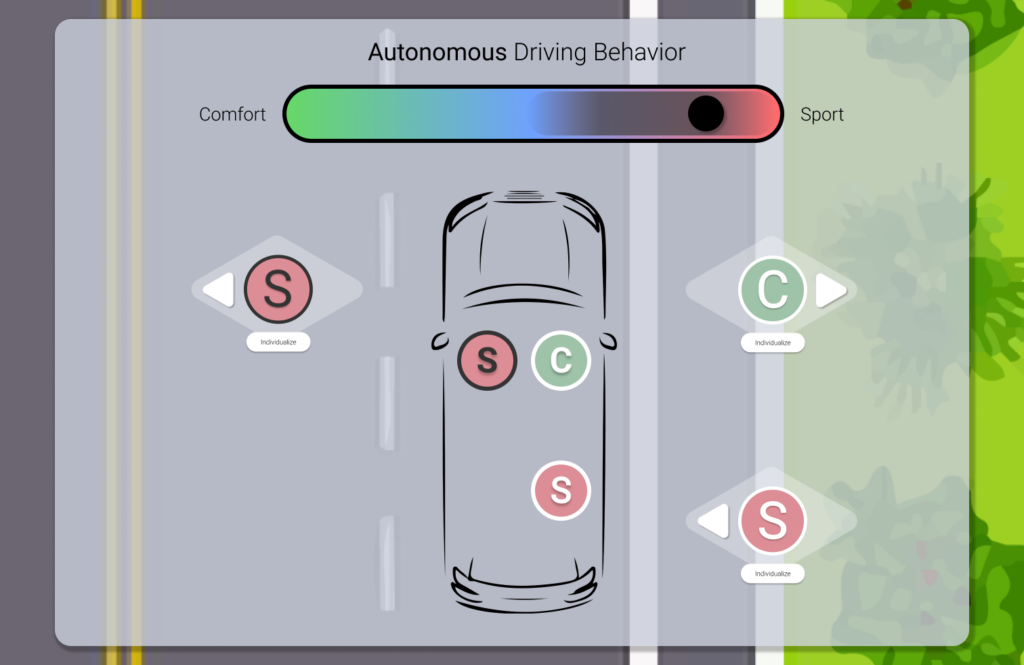
Graphic UI Development
The graphic UI is an important component of the concept as providing passengers with information regarding the AVs decisions can increase trust in the vehicle and therefore the comfort of passengers.
The Interface was developed through a combination of ProtoPie, Blender and Figma. The elements designed and modelled in Blender and Figma were combined in ProtoPie which then used values from the ESP32 controllers built into the technical prototype.
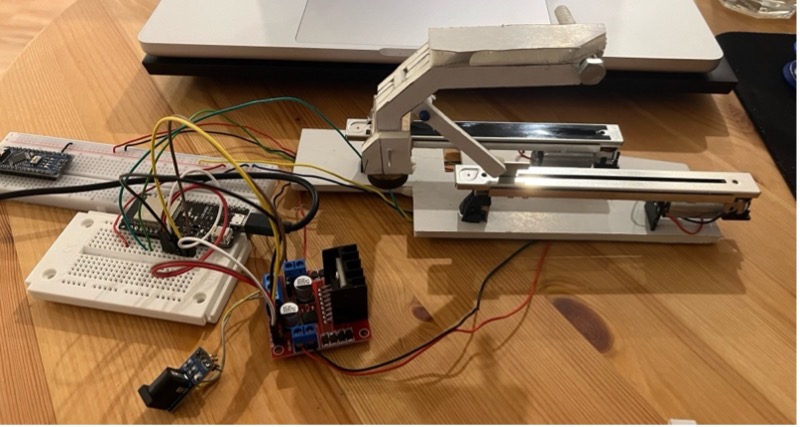
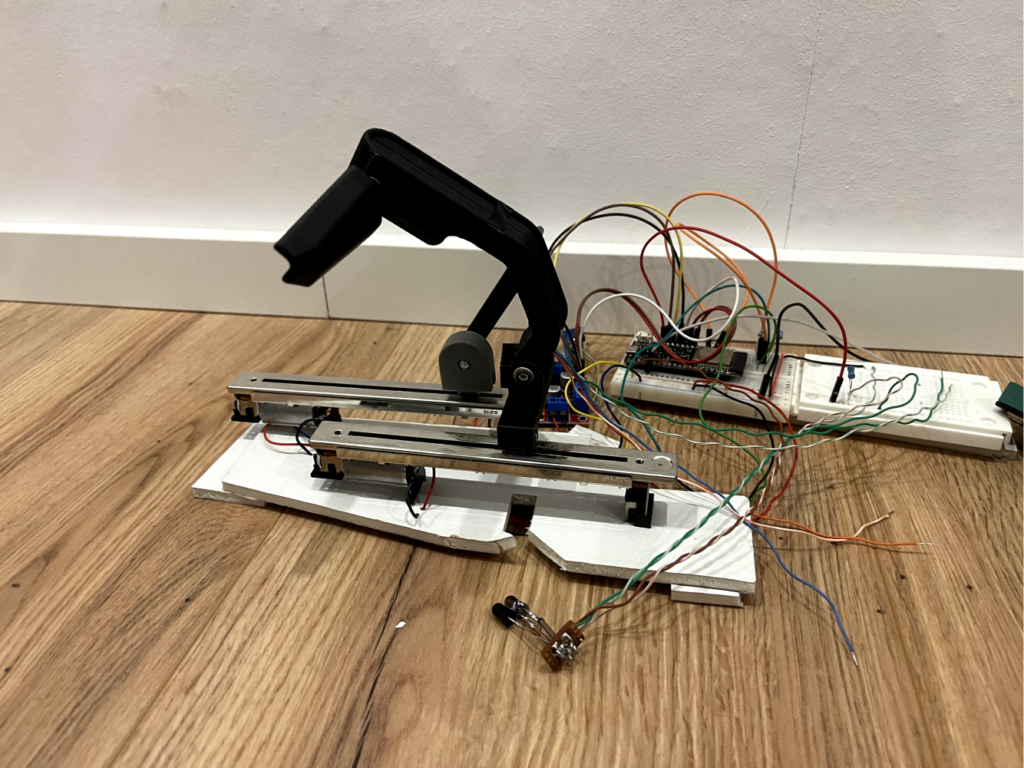
Technical Prototype
In order to make the concept experienceable, a technical prototype was built which provided actual haptic feedback to users. Each prototype was equipped with two ALPS RSAON11M9 motorfaders positioned side by side. By working in tandem, these faders provided force feedback along the X and Y axes.
The motorfaders were controlled by a L298N motor controller connected to an ESP32 whose Wi-Fi capability was an important aspect enabling multiple prototypes to communicate in real time with one another and with the GUI.



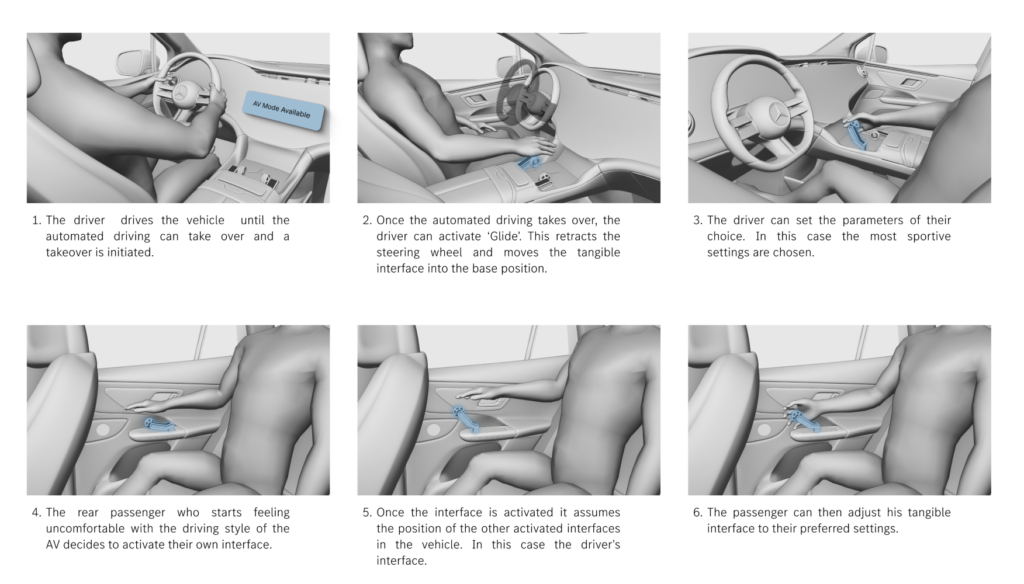
Final Concept: Glide
‘Glide’ aims to enhance passenger comfort in AVs by offering a tangible interface for adjusting driving style and a graphic interface for visualizing these adjustments. The concept also proposes an innovative control division between the passengers of the vehicle where each passenger is provided with an adequate amount of control to ensure a better user experience when driving in AVs. The driver is given the ability to set a permissible range in which the AVs driving style can be adjusted and the passengers are provided with the ability to fine-tune the style within this range without undermining the driver’s authority.
The concept translates a theoretical control distribution model into a physical, experiential system, demonstrating the feasibility of shared control in AVs and serving as a steppingstone for further research. Whilst the earlier focus was on creating a rich and meaningful interactive interface, it has become a concept that demonstrates the possibilities of shared control between passengers in AVs.

To read about my Master thesis project in more detail you can find the report here: